
目录
快速导航-

电子与信息器件 | 高精度电流传感器温度补偿方法的研究
电子与信息器件 | 高精度电流传感器温度补偿方法的研究
-

电子与信息器件 | 基于YOLOv5的无人机桥面病害检测算法研究
电子与信息器件 | 基于YOLOv5的无人机桥面病害检测算法研究
-

电子与信息器件 | 基于RF-EHWSN的能量自适应多跳路由协议
电子与信息器件 | 基于RF-EHWSN的能量自适应多跳路由协议
-

电子与信息器件 | 光电二极管放大电路的SPICE仿真与实验研究
电子与信息器件 | 光电二极管放大电路的SPICE仿真与实验研究
-

电子与信息器件 | 基于智能家居中控屏的设备控制方案设计
电子与信息器件 | 基于智能家居中控屏的设备控制方案设计
-

电子与信息器件 | 基于MVMD-互相关时频域特征的风电变流器开路故障诊断
电子与信息器件 | 基于MVMD-互相关时频域特征的风电变流器开路故障诊断
-

计算机科学与应用 | TS-SEA:用于时间序列分类的时域-频域-季节性联合对比学习
计算机科学与应用 | TS-SEA:用于时间序列分类的时域-频域-季节性联合对比学习
-

计算机科学与应用 | 投影子空间下人体动作序列预测研究
计算机科学与应用 | 投影子空间下人体动作序列预测研究
-

计算机科学与应用 | 结合深度学习和自适应的业务动态访问控制研究及应用分析
计算机科学与应用 | 结合深度学习和自适应的业务动态访问控制研究及应用分析
-

计算机科学与应用 | 基于DSM的最小化总返工次数的活动排序问题研究
计算机科学与应用 | 基于DSM的最小化总返工次数的活动排序问题研究
-

计算机科学与应用 | 基于集成学习的交通事故严重程度预测
计算机科学与应用 | 基于集成学习的交通事故严重程度预测
-

计算机科学与应用 | 基于MCSANet网络的运动想象脑电分类
计算机科学与应用 | 基于MCSANet网络的运动想象脑电分类
-

激光与红外技术 | 前镜参考型非定域干涉测角系统研究
激光与红外技术 | 前镜参考型非定域干涉测角系统研究
-

激光与红外技术 | 综采工作面刮板输送机煤流轮廓点云的配准方法研究
激光与红外技术 | 综采工作面刮板输送机煤流轮廓点云的配准方法研究
-

能源技术 | 基于FFT-DC-GRU-NLA的中长期居民用电量预测模型
能源技术 | 基于FFT-DC-GRU-NLA的中长期居民用电量预测模型
-

能源技术 | 基于GA-LSTM神经网络的充电桩故障诊断
能源技术 | 基于GA-LSTM神经网络的充电桩故障诊断
-

能源技术 | 基于改进YOLOv7-tiny的绝缘子缺陷检测网络
能源技术 | 基于改进YOLOv7-tiny的绝缘子缺陷检测网络
-

能源技术 | 基于卷积神经网络和Transformer的电能质量扰动分类
能源技术 | 基于卷积神经网络和Transformer的电能质量扰动分类
-

前沿交叉科学 | 考虑高低频特征的视觉离焦图像暗边缘局部复原算法
前沿交叉科学 | 考虑高低频特征的视觉离焦图像暗边缘局部复原算法
-

前沿交叉科学 | 基于机器学习的区域性综合资源调度与优化算法设计
前沿交叉科学 | 基于机器学习的区域性综合资源调度与优化算法设计
-

前沿交叉科学 | 多模态资源检索与跨模态图谱构建
前沿交叉科学 | 多模态资源检索与跨模态图谱构建
-

前沿交叉科学 | 基于随机森林算法的轿车碰撞损伤预测研究
前沿交叉科学 | 基于随机森林算法的轿车碰撞损伤预测研究
-

前沿交叉科学 | 基于多传感器信息融合的运动轨迹跟踪系统设计
前沿交叉科学 | 基于多传感器信息融合的运动轨迹跟踪系统设计
-

深海深空深地技术 | 一种空天大尺度构型下双基雷达等距离环杂波仿真方法
深海深空深地技术 | 一种空天大尺度构型下双基雷达等距离环杂波仿真方法
-

人工智能 | LSTM-MSTCN-XGBoost混合模型的时空数据特征挖掘
人工智能 | LSTM-MSTCN-XGBoost混合模型的时空数据特征挖掘
-

人工智能 | 基于动态自适应的电梯钢带典型故障检测算法
人工智能 | 基于动态自适应的电梯钢带典型故障检测算法
-

人工智能 | 人工智能大数据技术在治理虚拟货币刑事犯罪中的应用研究
人工智能 | 人工智能大数据技术在治理虚拟货币刑事犯罪中的应用研究
-

人工智能 | 基于计算机视觉的机器人轨迹精度评估系统的设计与实现
人工智能 | 基于计算机视觉的机器人轨迹精度评估系统的设计与实现
-
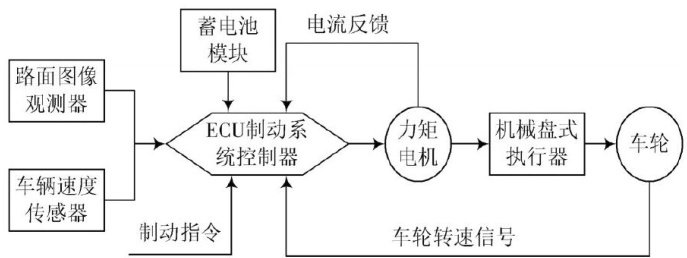
人工智能 | 轮式机器人EMB制动最佳滑移率线性自抗扰控制
人工智能 | 轮式机器人EMB制动最佳滑移率线性自抗扰控制
过往期刊
更多-

现代电子技术
2025年20期 -

现代电子技术
2025年19期 -

现代电子技术
2025年18期 -

现代电子技术
2025年17期 -

现代电子技术
2025年16期 -

现代电子技术
2025年15期 -

现代电子技术
2025年14期 -

现代电子技术
2025年13期 -

现代电子技术
2025年12期 -

现代电子技术
2025年11期 -

现代电子技术
2025年10期 -

现代电子技术
2025年09期 -

现代电子技术
2025年08期 -

现代电子技术
2025年07期 -

现代电子技术
2025年06期 -

现代电子技术
2025年05期 -

现代电子技术
2025年04期 -

现代电子技术
2025年03期 -

现代电子技术
2025年02期 -

现代电子技术
2025年01期





 登录
登录