
目录
快速导航-
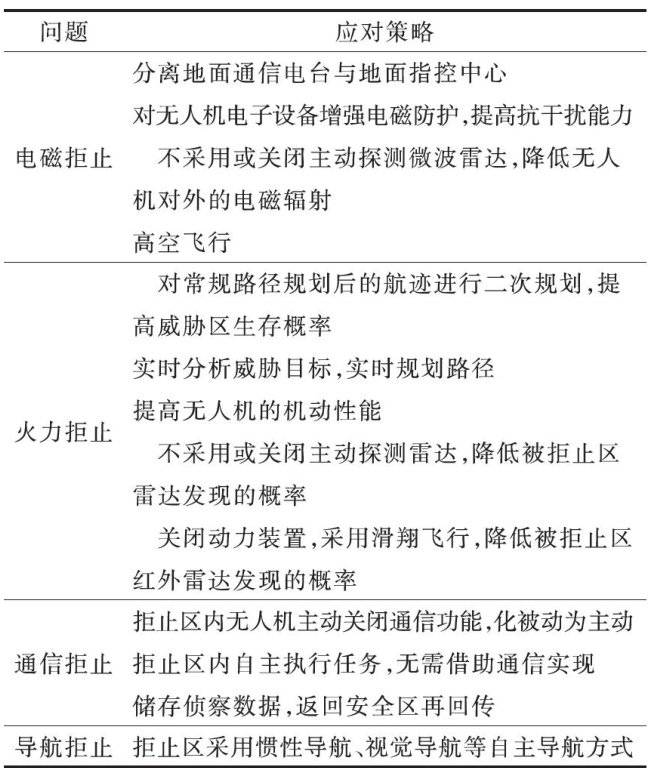
专栏 | 强拒止条件下的无人机系统生存策略
专栏 | 强拒止条件下的无人机系统生存策略
-
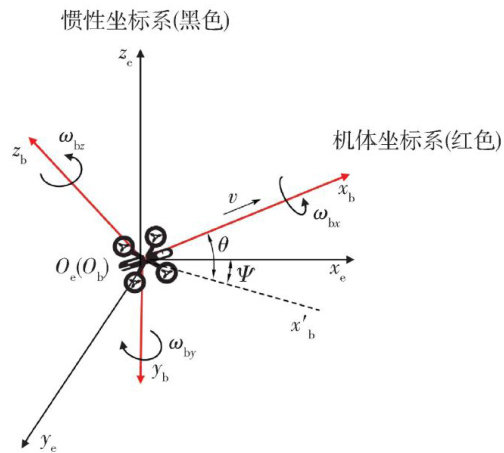
专栏 | 面向无人机路径规划的A *-DWA分层融合算法
专栏 | 面向无人机路径规划的A *-DWA分层融合算法
-
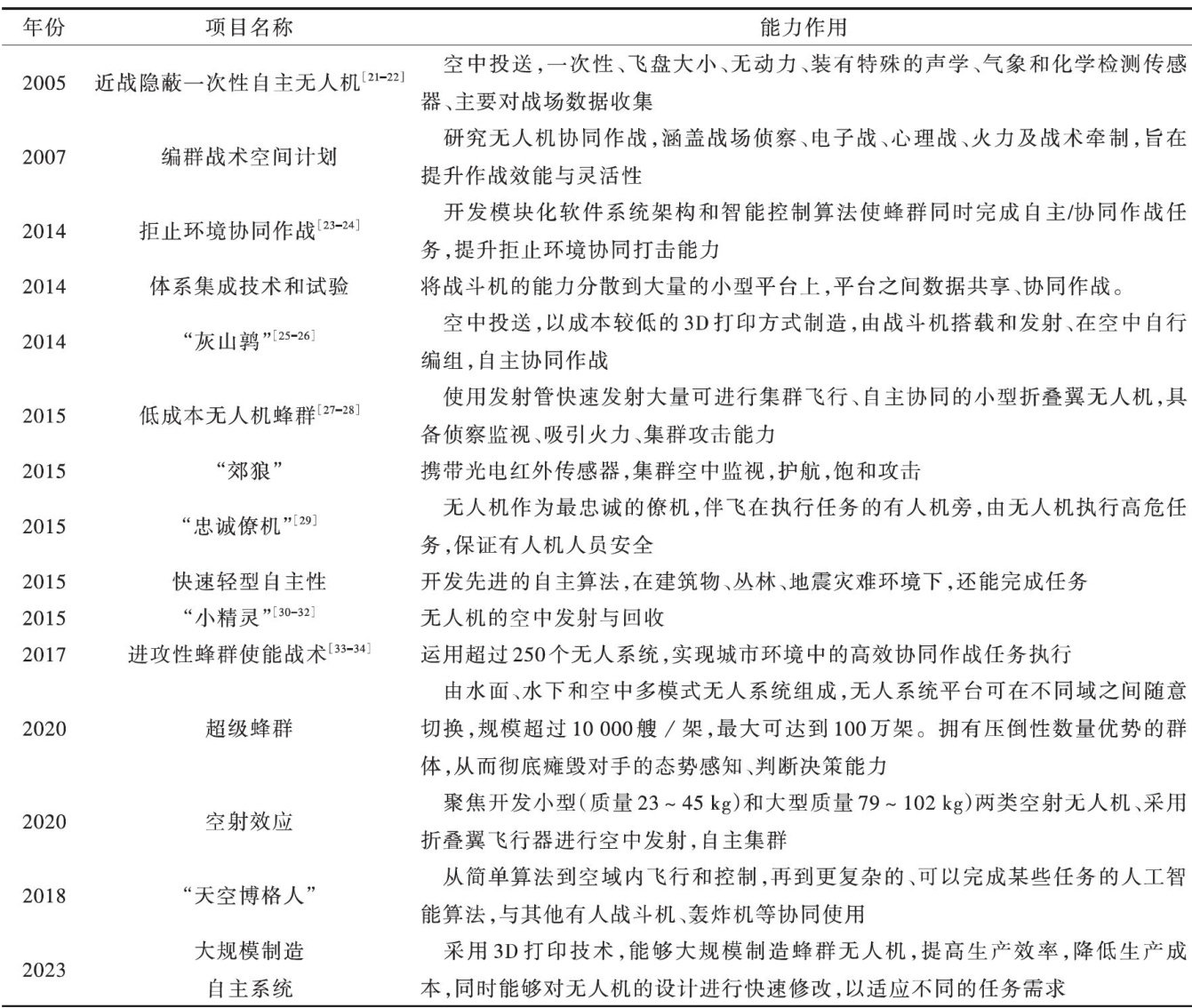
论文 | 无人机蜂群技术发展及其在登陆环境中的应用
论文 | 无人机蜂群技术发展及其在登陆环境中的应用
-

论文 | αβ滤波器的设计分析及改进研究
论文 | αβ滤波器的设计分析及改进研究
-
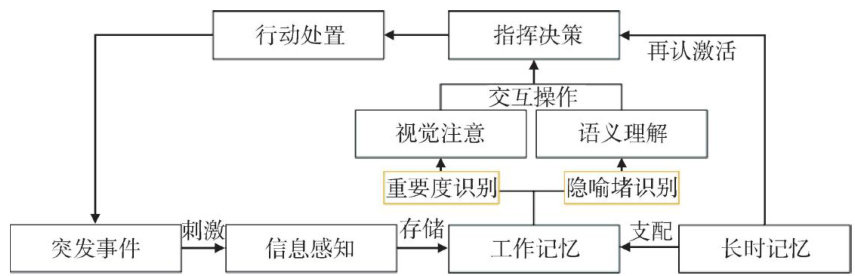
论文 | 基于增强现实的指挥空间信息布局设计研究
论文 | 基于增强现实的指挥空间信息布局设计研究
-

论文 | 小型均匀圆阵高精度测向方法及系统实现
论文 | 小型均匀圆阵高精度测向方法及系统实现
-

论文 | 基于深度强化学习智能制导的研究思考
论文 | 基于深度强化学习智能制导的研究思考
-
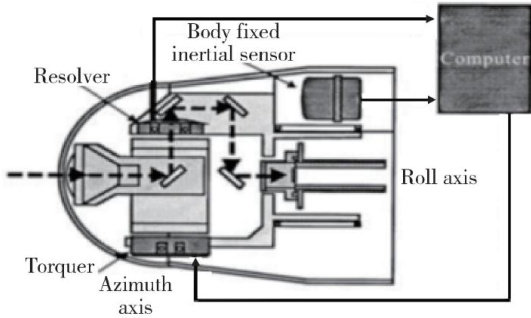
论文 | 再论导引头半捷联伺服镜最优控制系统的性能提升
论文 | 再论导引头半捷联伺服镜最优控制系统的性能提升
-

论文 | 基于分布式信息滤波算法的目标跟踪方法
论文 | 基于分布式信息滤波算法的目标跟踪方法
-
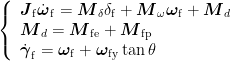
论文 | 固定时间收敛的引信滚转角控制方法
论文 | 固定时间收敛的引信滚转角控制方法
-
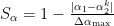
论文 | 有源无源数据协同的目标识别算法
论文 | 有源无源数据协同的目标识别算法
-
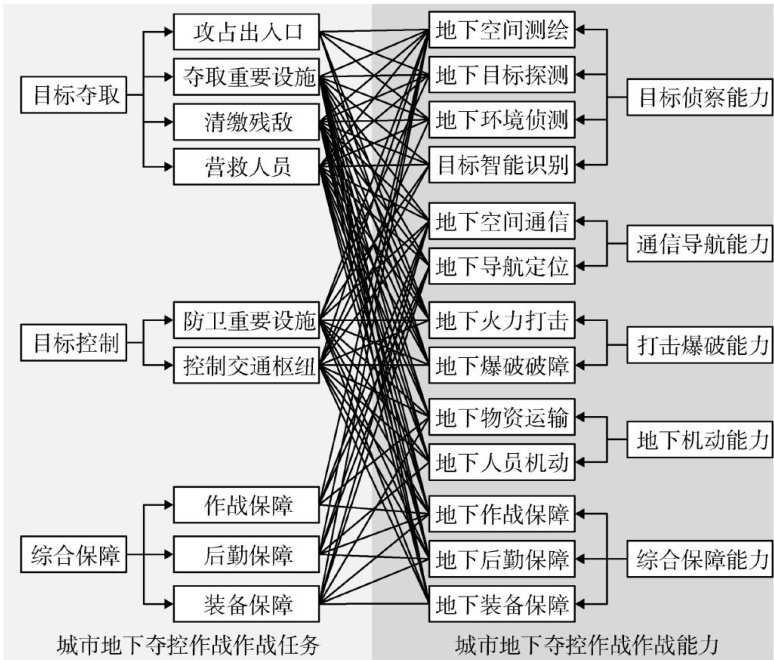
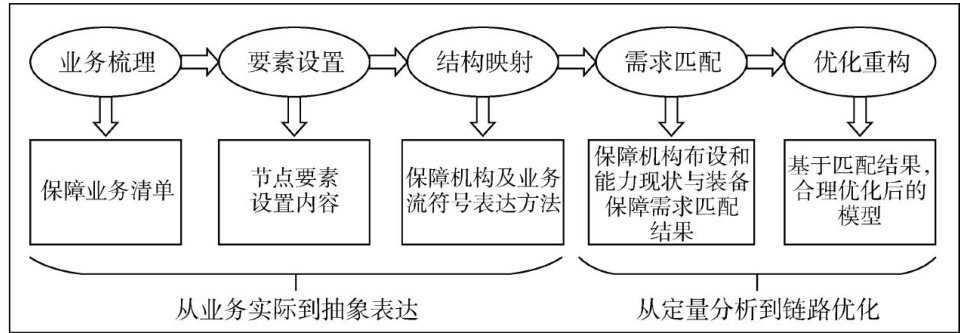
论文 | 基于GQFD的城市地下夺控作战能力需求分析
论文 | 基于GQFD的城市地下夺控作战能力需求分析
-

论文 | 针对机动目标的滑模协同末制导律设计
论文 | 针对机动目标的滑模协同末制导律设计
-

论文 | 基于直觉模糊集的装备健康状态评估方法
论文 | 基于直觉模糊集的装备健康状态评估方法
-
论文 | 航天装备保障链概念特点与模型构建研究
论文 | 航天装备保障链概念特点与模型构建研究
-
论文 | 基于RBF神经网络的二阶不确定系统自适应滑模控制
论文 | 基于RBF神经网络的二阶不确定系统自适应滑模控制
-

论文 | 基于虚拟力粒子群算法的多无人机覆盖优化
论文 | 基于虚拟力粒子群算法的多无人机覆盖优化







 登录
登录